The SmartRegen 10A Motor Controller is an upgraded version of my previous TL494-based PWM DC motor controller. This revision keeps the same main design concept: analog PWM control, MOSFET H-bridge switching, current limiting, regenerative braking, DC-bus overvoltage protection, and custom PCB layout. However, this version was redesigned for a higher current target of 12V / 10A maximum.
The goal of this revision was to improve the controller for higher-current DC motor applications while keeping the system fully hardware-based. Instead of using a microcontroller or a prebuilt motor driver module, the controller uses analog and digital logic ICs to generate PWM, select the operating mode, monitor current, and protect the DC bus during regenerative braking.
This version includes a lower-value current-sense resistor, a reduced regenerative overvoltage threshold, a 5V output on the control connector for external circuits, and significantly enlarged PCB power traces to better handle the increased current.
Project Overview
The SmartRegen 10A controller is designed for robotics, RC vehicles, rovers, motorized platforms, and future experimental systems where bidirectional DC motor control and regenerative braking may be useful.
The circuit is based around a TL494 PWM controller, IRF3205 N-channel MOSFET H-bridge, IR2110S high-side/low-side gate drivers, SN74153 digital multiplexers, and a CD4053 analog switch for bidirectional motor-voltage feedback.
The controller supports five operating modes:
- Coast
- Forward drive
- Reverse drive
- Forward regenerative braking
- Reverse regenerative braking
The updated design targets 12V / 10A maximum operation, with a 0.02Ω / 5W current-sense resistor, enlarged high-current copper paths, improved H-bridge routing, and a DC-bus protection circuit that activates at approximately 12.8V during regenerative braking.
Main Features
- TL494-based PWM speed control
- 12V / 10A maximum target operating range
- Full MOSFET H-bridge for bidirectional DC motor control
- Four IRF3205 N-channel MOSFETs
- Dual IR2110S high-side/low-side gate drivers
- Forward, reverse, coast, forward-regen brake, and reverse-regen brake modes
- PWM-controlled regenerative braking
- 0.02Ω / 5W current-sense resistor
- Current-limit feedback into the TL494 control loop
- CD4053 analog switching for motor-voltage feedback polarity selection
- Dual SN74153 multiplexers for digital mode control
- Battery/DC-bus overvoltage protection during regeneration
- Regenerative overvoltage limit reduced to approximately 12.8V
- MOSFET-controlled dump-load circuit using a braking resistor
- TVS diode protection across the DC bus
- Dual 2200µF bulk capacitors for motor startup and bus stabilization
- Local H-bridge decoupling capacitors near the MOSFET power stage
- Enlarged PCB power traces for the higher-current 10A design
- 5V output added to the control connector for external circuits or MCU use
- Manual control connector for switches, speed control, and future external control systems
Circuit Breakdown
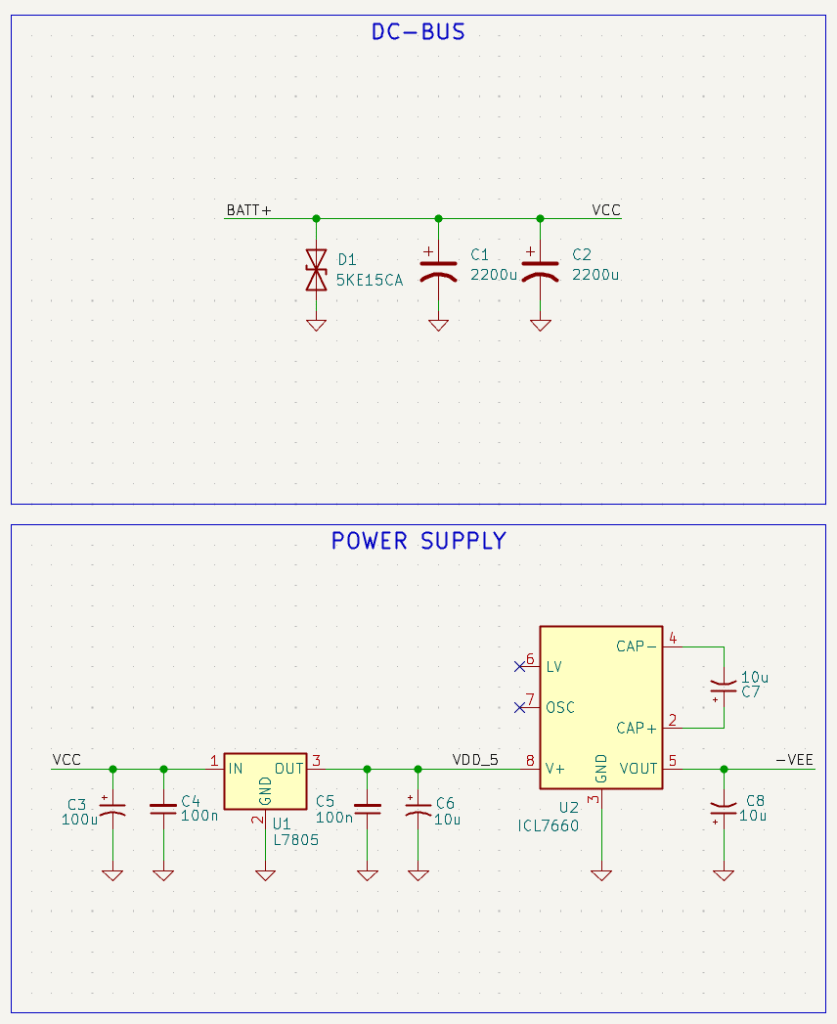
1. DC-Bus and Power Supply Section
The controller is powered from the main BATT+ and BATT− input terminals. This input forms the main DC bus used by both the motor power stage and the low-voltage control electronics.
In the DC-bus section, a 5KE15CA TVS diode is connected across the supply input to help clamp voltage spikes caused by motor switching, wiring inductance, and regenerative events. Two large 2200µF electrolytic capacitors are connected across the bus to provide local energy storage for motor startup, sudden load changes, and high-current PWM switching.
The low-voltage supply section uses an L7805 regulator to generate the 5V logic rail, labeled VDD_5. This 5V rail powers the digital logic devices, including the SN74153 multiplexers and the logic side of the gate-driver circuitry. Local input and output capacitors are placed around the regulator to improve stability and reduce supply noise.
The circuit also includes an ICL7660 charge-pump voltage inverter, which generates the negative rail labeled −VEE. This negative rail is used by the analog feedback section so the circuit can process bidirectional motor feedback signals more reliably. Decoupling capacitors are placed close to the ICL7660 to support stable charge-pump operation.
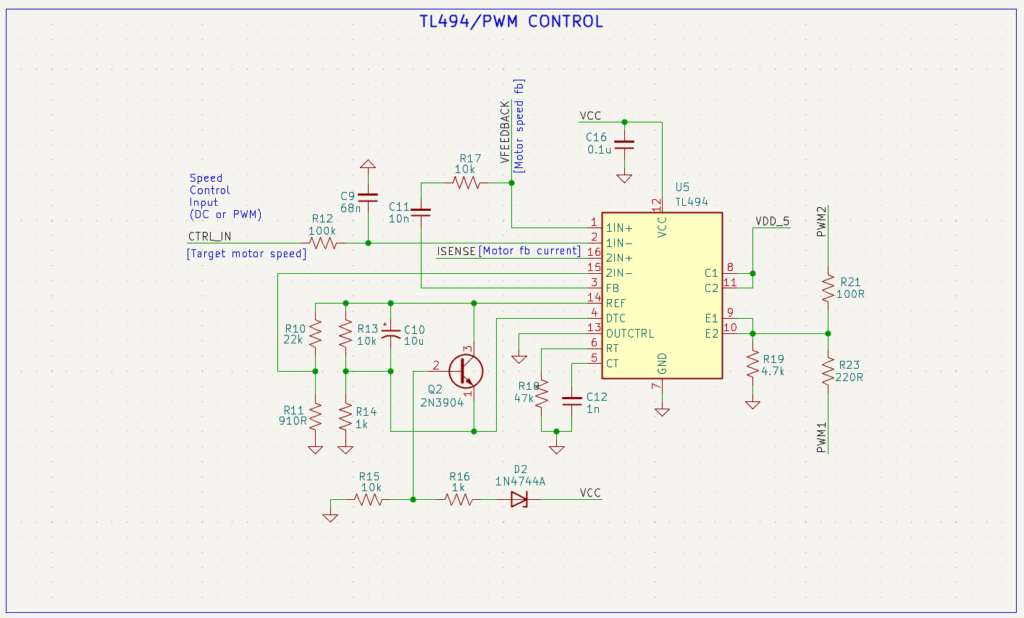
2. TL494 PWM Control Section
The TL494 is the main PWM controller used to generate the motor drive signal. The speed command enters the circuit through the CTRL_IN input, which can accept either a DC control voltage or a PWM-derived control signal. This signal represents the target motor speed.
The input network around R12, C9, C11, and R17 filters and conditions the control signal before it reaches the TL494 error-amplifier inputs. This allows the circuit to compare the requested speed command with the feedback signal coming from the motor.
The motor feedback and current-sense feedback are combined into the TL494 control loop. The signal labeled VFEEDBACK represents motor-speed feedback, while ISENSE represents the current feedback from the shunt resistor. These signals allow the TL494 to automatically reduce the PWM duty cycle when the motor current rises too high or when the feedback condition requires correction.
The TL494 timing components are set by R18 and C12, which determine the oscillator frequency. The output section of the TL494 generates the PWM signals labeled PWM1 and PWM2. In this design, the PWM signal is not sent directly to the MOSFETs. Instead, it is passed to the digital mode-selection logic so the same PWM source can be routed to the correct side of the H-bridge depending on the selected operating mode.
The surrounding transistor and reference network, including Q2, D2, and the resistor network around the TL494, help condition the control and limiting behavior of the PWM loop.
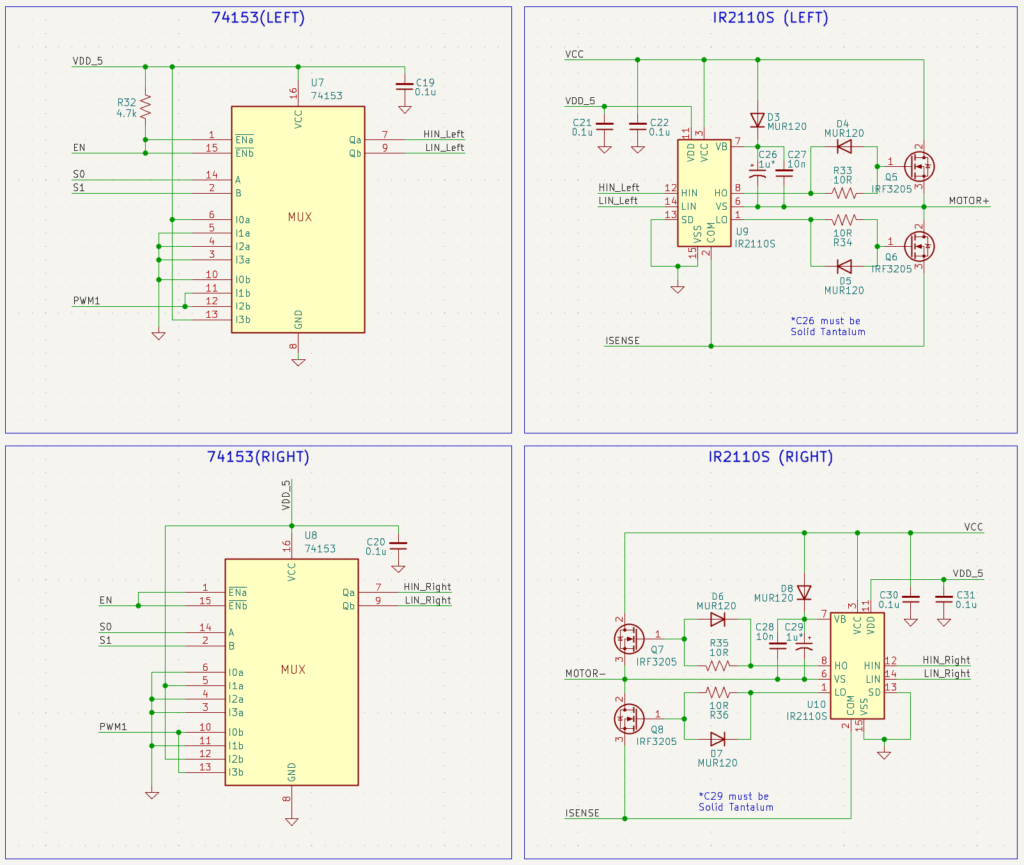
3. Mode Selection Logic and H-Bridge Gate Drive
The controller uses two SN74153 dual 4-to-1 multiplexers to select which gate-driver inputs receive logic-high, logic-low, or PWM signals. One multiplexer controls the left half-bridge logic signals, and the other controls the right half-bridge logic signals.
The mode-selection inputs are:
- EN
- S0
- S1
These signals determine whether the controller is in coast, forward, reverse, forward regenerative braking, or reverse regenerative braking mode.
The outputs of the multiplexers are:
- HIN_Left
- LIN_Left
- HIN_Right
- LIN_Right
These signals are sent to the two IR2110S high-side/low-side gate drivers. Each IR2110S controls one half-bridge. The left IR2110S drives the MOSFETs connected to the MOTOR+ terminal, while the right IR2110S drives the MOSFETs connected to the MOTOR− terminal.
The MOSFET power stage uses four IRF3205 N-channel MOSFETs arranged as a full H-bridge. This allows the motor polarity to be reversed electronically for forward and reverse operation.
Each IR2110S includes a bootstrap supply network for the high-side MOSFET. The bootstrap diodes and capacitors, such as D3/D4/C26/C27 on the left side and D6/D8/C28/C29 on the right side, allow the high-side gate voltage to rise above the motor supply rail when the high-side MOSFET needs to turn on.
Gate resistors are included in series with the MOSFET gates to limit gate-charging current, reduce ringing, and improve switching behavior. The gate-drive section is one of the most critical parts of the design because the MOSFETs must switch cleanly while carrying the higher 10A target current.
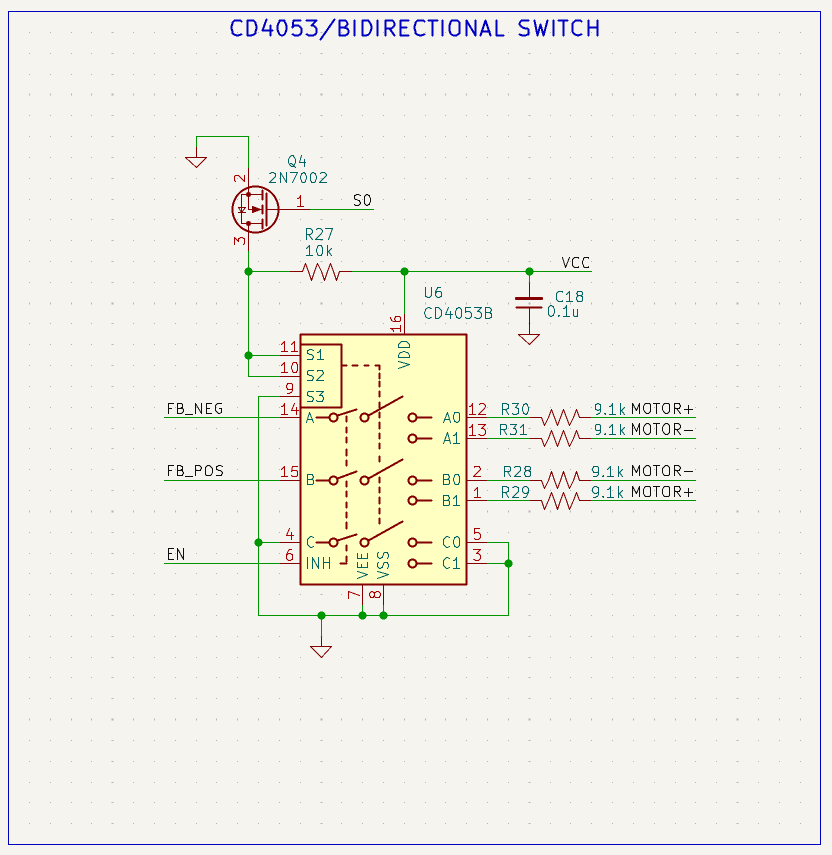
4. Bidirectional Motor Feedback Switching Using CD4053
Because the motor can spin in both directions, the voltage polarity across the motor terminals changes depending on the selected mode. To make the feedback signal usable by the analog control section, the design uses a CD4053 bidirectional analog switch.
The CD4053 selects which motor terminal is treated as the positive feedback input and which terminal is treated as the negative feedback input. This allows the controller to generate consistent feedback signals labeled:
- FB_POS
- FB_NEG
The motor terminals are connected to the CD4053 through resistor networks using 9.1kΩ resistors. These resistors help scale and isolate the motor terminal voltage before it enters the analog switching circuit.
The control input for the CD4053 is related to the direction-selection logic. A 2N7002 MOSFET and pull-up resistor are used to condition the switch-control signal so the CD4053 selects the correct feedback polarity based on the selected motor direction.
This section is important because the TL494 feedback loop needs a consistent signal reference. Without polarity correction, the feedback signal would change sign when the motor direction changes, making the analog control loop much harder to manage.
5. Current-Sense Feedback
The 10A revision uses a 0.02Ω / 5W current-sense resistor in the low-side current path. This resistor produces a small voltage proportional to motor current.
One of the most important changes in this revision is the current-sense resistor. For the 10A version, the sense resistor was changed to 0.02 Ω:
At 10A:
V_SENSE = I × R
V_SENSE = 10A × 0.02Ω
V_SENSE = 0.2V
The power dissipated in the shunt resistor at 10A is:
P = I²R
P = (10A)² × 0.02Ω
P = 2W
A 5W resistor was selected to provide margin above the expected 2W dissipation. This is important because the shunt can heat up during startup, braking, stall conditions, or extended high-current operation.
The sense voltage is routed back to the TL494 control section through the ISENSE signal. When the motor current increases, the TL494 can reduce PWM duty cycle to limit current and protect the MOSFETs, shunt resistor, PCB traces, motor, and battery.
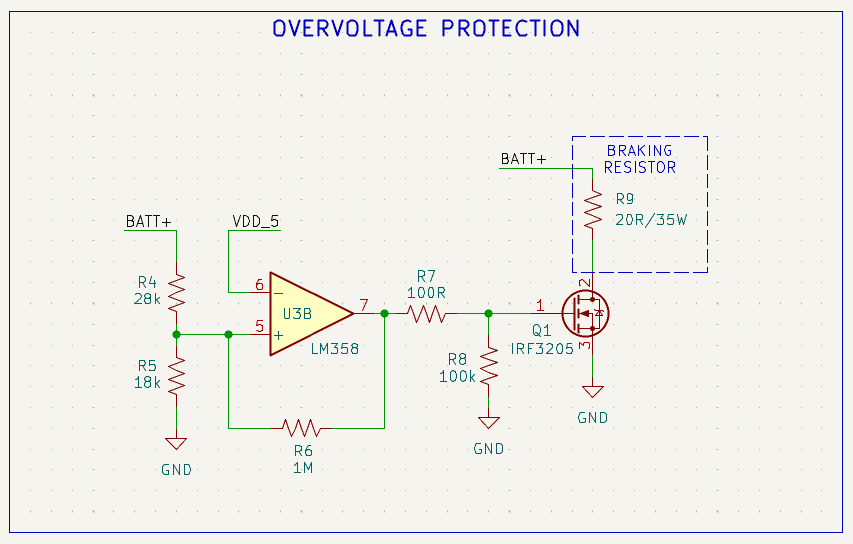
6. Regenerative Overvoltage Protection
During regenerative braking, the motor acts like a generator and pushes energy back into the DC bus. If the battery cannot absorb this energy fast enough, the bus voltage can rise. To prevent excessive DC-bus voltage, the controller includes an overvoltage protection circuit.
The overvoltage protection section uses an LM358 op-amp/comparator stage to monitor the battery voltage through a resistor divider made from R4 and R5. In this revision, the regenerative bus-voltage limit was reduced to approximately 12.8V, allowing the protection circuit to activate earlier during braking.
When the divided battery voltage exceeds the comparator threshold, the LM358 output drives the gate of Q1, an IRF3205 MOSFET, through R7. A 100kΩ gate pulldown resistor keeps the MOSFET off when the comparator is not actively driving it.
When Q1 turns on, it connects the 20Ω / 35W braking resistor across the DC bus. This braking resistor works as a dump load, converting excess regenerated electrical energy into heat.
The dump-load circuit does not replace the battery as the main energy storage element. Instead, it provides a protection path when the DC bus voltage rises too high during regenerative braking. This helps prevent the bus capacitors, MOSFETs, and control circuitry from being exposed to excessive voltage.
7. Control Connector and External Interface
The control connector provides the external interface for manual control, switches, or a future microcontroller. The connector includes:
- GND
- 5V output
- S1
- S0
- EN
- CTRL
The added 5V output makes the board easier to interface with external circuits. It can be used for switch pull-ups, basic control logic, sensors, or a small MCU interface, as long as the external load stays within the available current capability of the onboard 5V regulator.
The S1, S0, and EN pins select the operating mode, while the CTRL pin controls the PWM command input. For bench testing, these pins can be connected to a manual switch network and a potentiometer. For a more advanced setup, they can be driven by an external controller.
This interface makes the board flexible because the same hardware can be tested manually first and later connected to a microcontroller, RC receiver interface, or other control system.
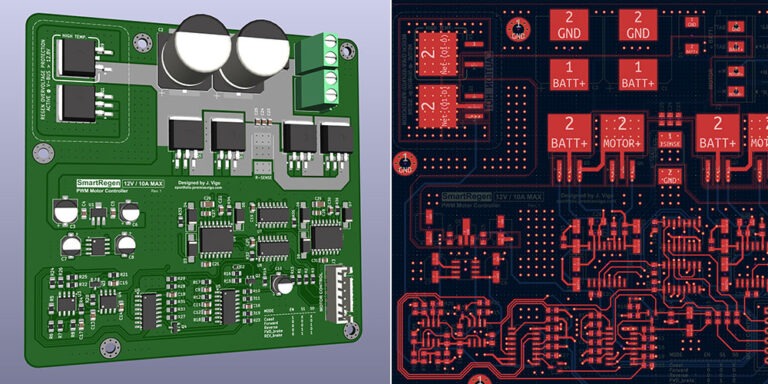
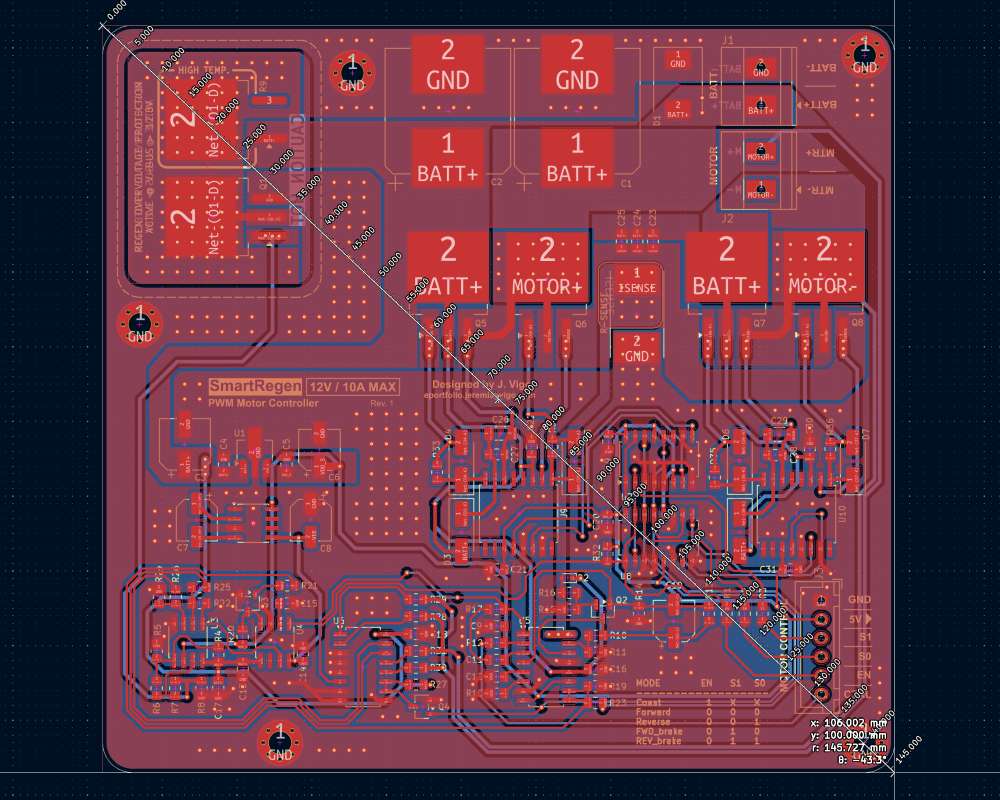
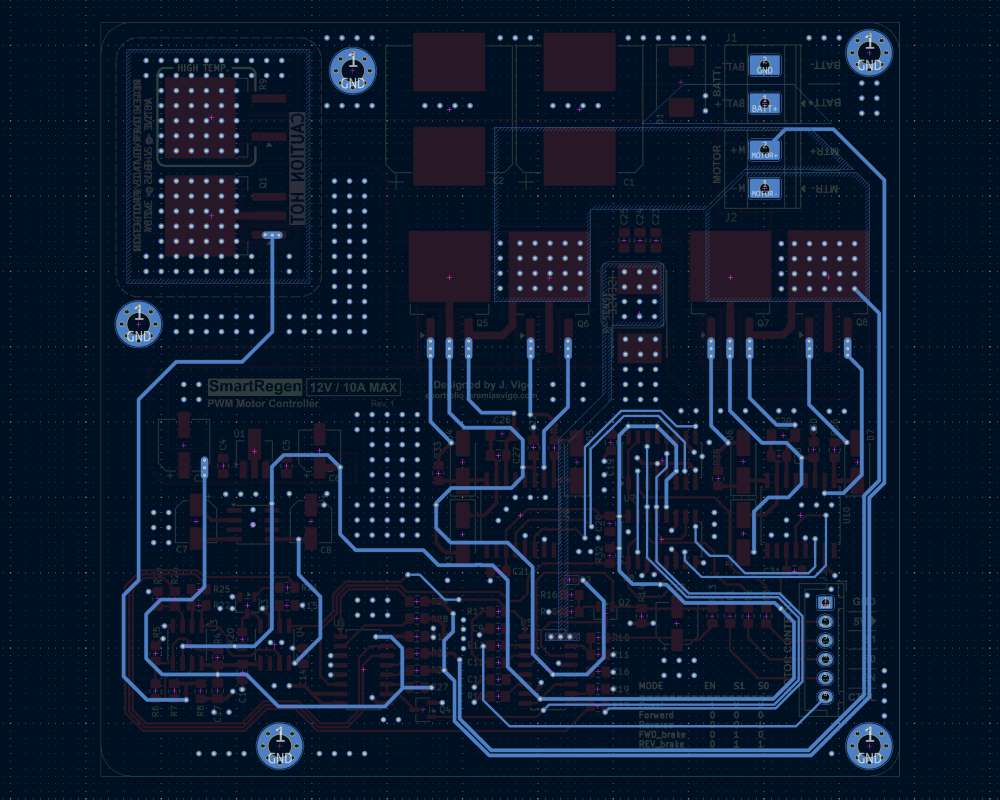
PCB Design
The PCB was redesigned for the higher 10A target current. One of the most visible improvements in this revision is that the high-current power traces were drastically enlarged.
The BATT+, BATT−, MOTOR+, MOTOR−, MOSFET, and current-sense paths carry the highest current in the system, so these traces were widened significantly compared with the previous version. This helps reduce voltage drop, resistive heating, and current crowding in the PCB copper.
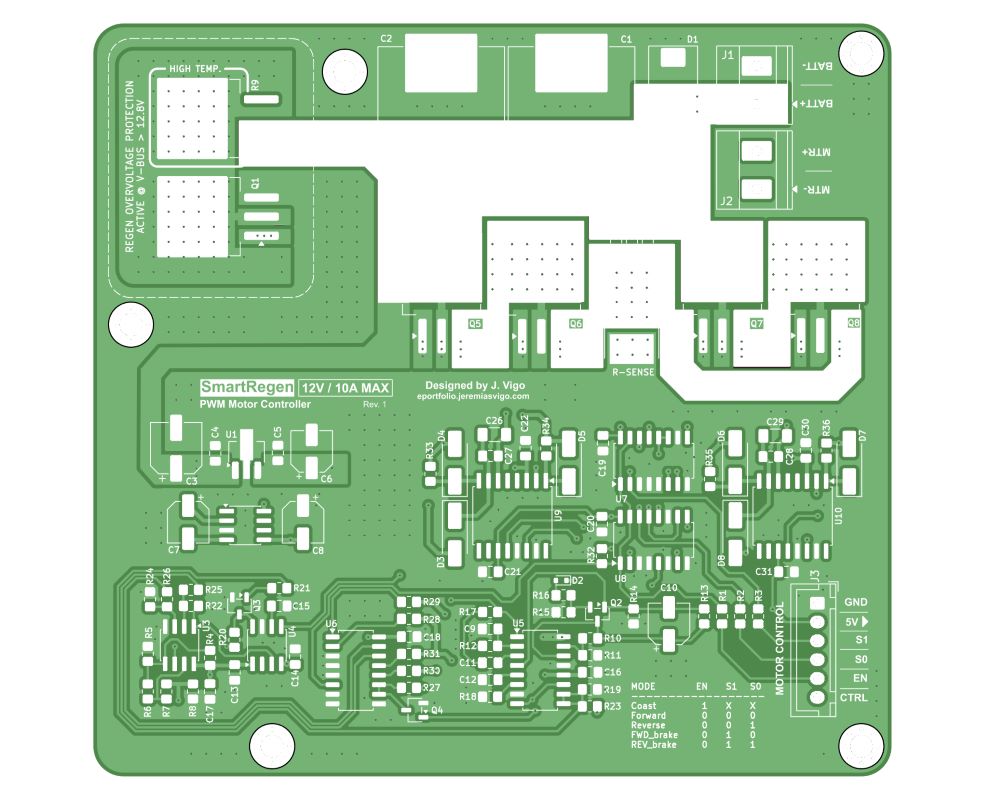
Some of the main PCB layout considerations included:
- Drastically enlarged power traces for the 10A current target
- Wider copper paths for BATT+, BATT−, MOTOR+, and MOTOR−
- Large copper areas around the MOSFETs for heat spreading
- Shorter paths between the MOSFETs, motor terminals, current-sense resistor, and bulk capacitors
- Local ceramic and bulk decoupling near the H-bridge section
- Separate routing for sensitive current-sense and feedback signals
- Short gate-drive traces from the IR2110S drivers to the MOSFET gates
- Dedicated high-temperature region for the regenerative dump-load resistor
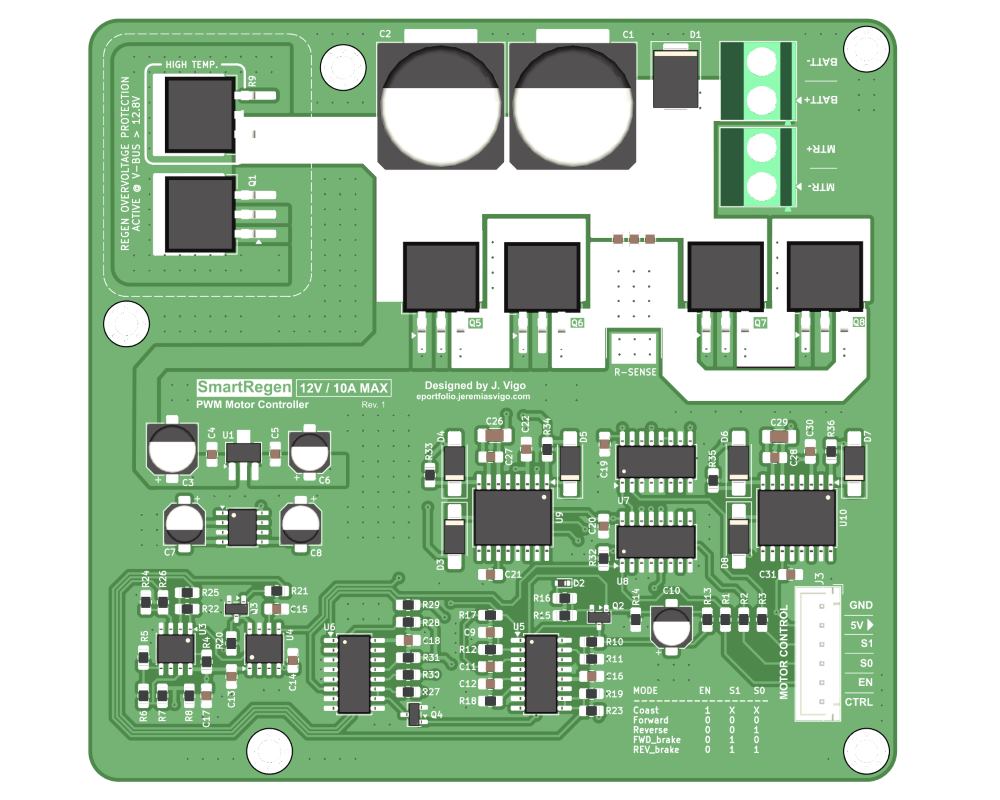
- Clear silkscreen labels for battery, motor, control pins, operating modes, and high-temperature areas
- Mounting holes for secure installation in a future enclosure or test platform
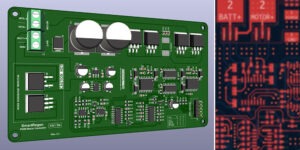
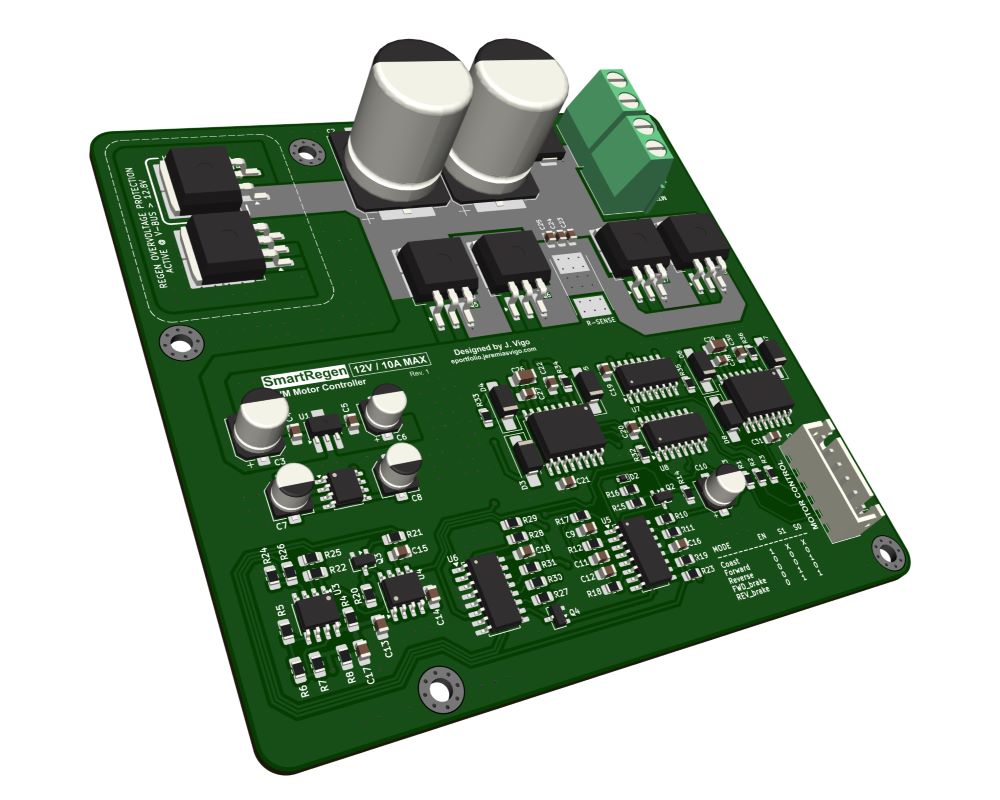
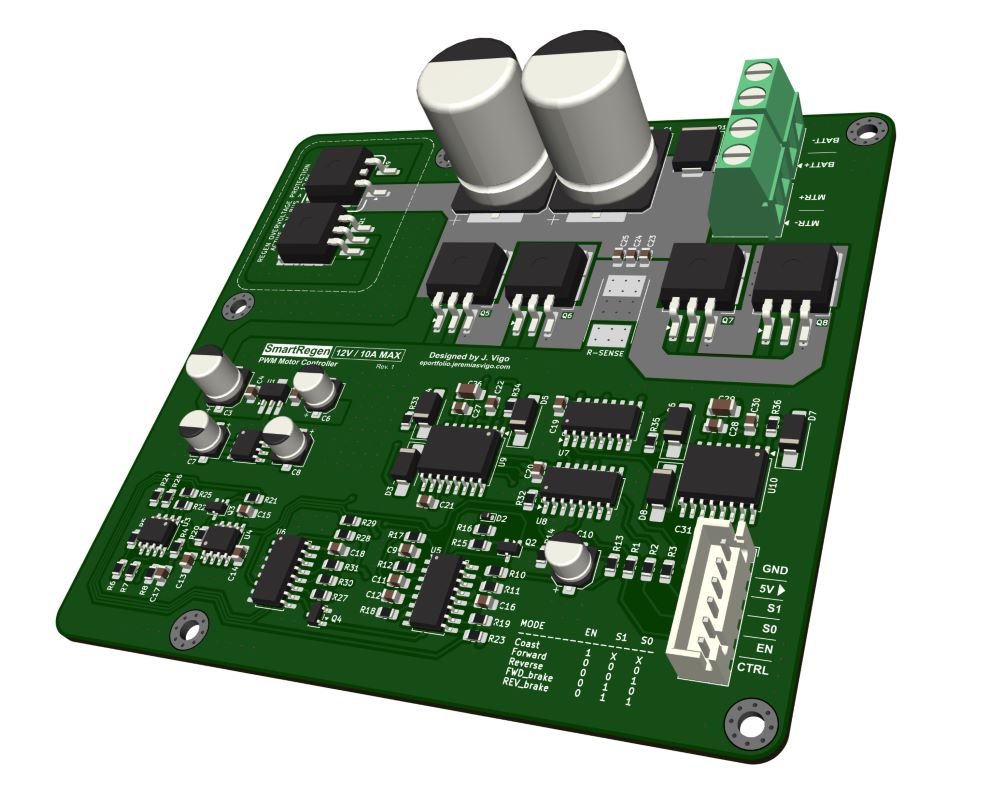
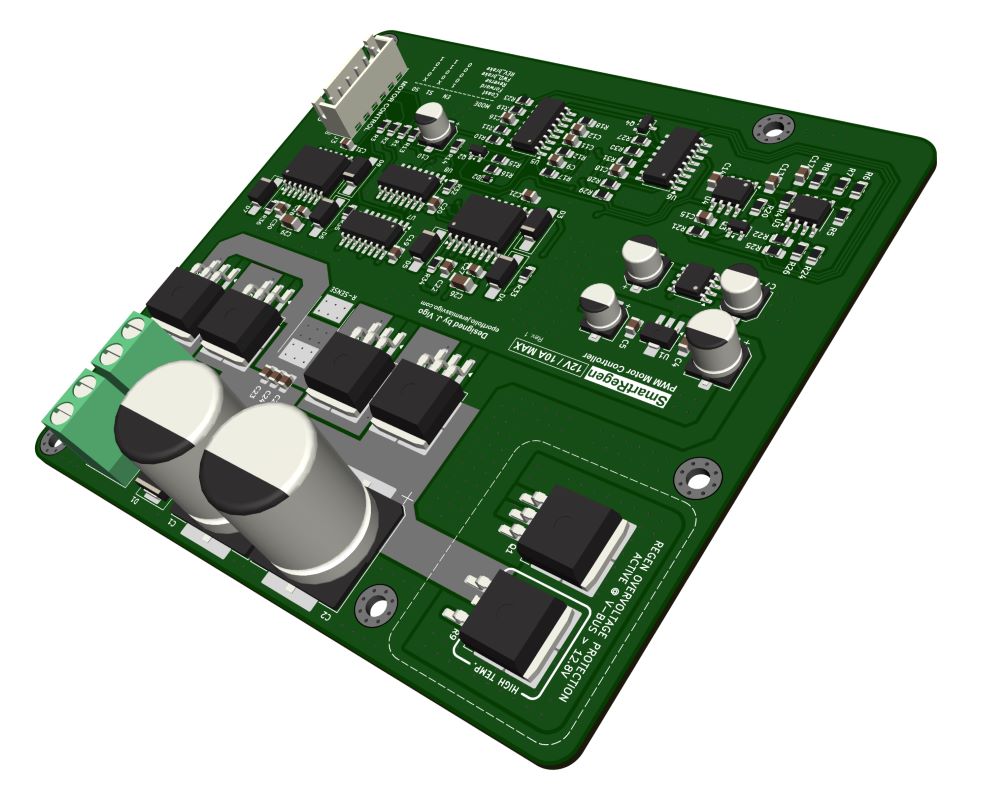
The top-side 3D render of the SmartRegen 10A PCB includes the MOSFETs, gate drivers, bulk capacitors, dump-load protection area, control connector, and labeled operating mode table.
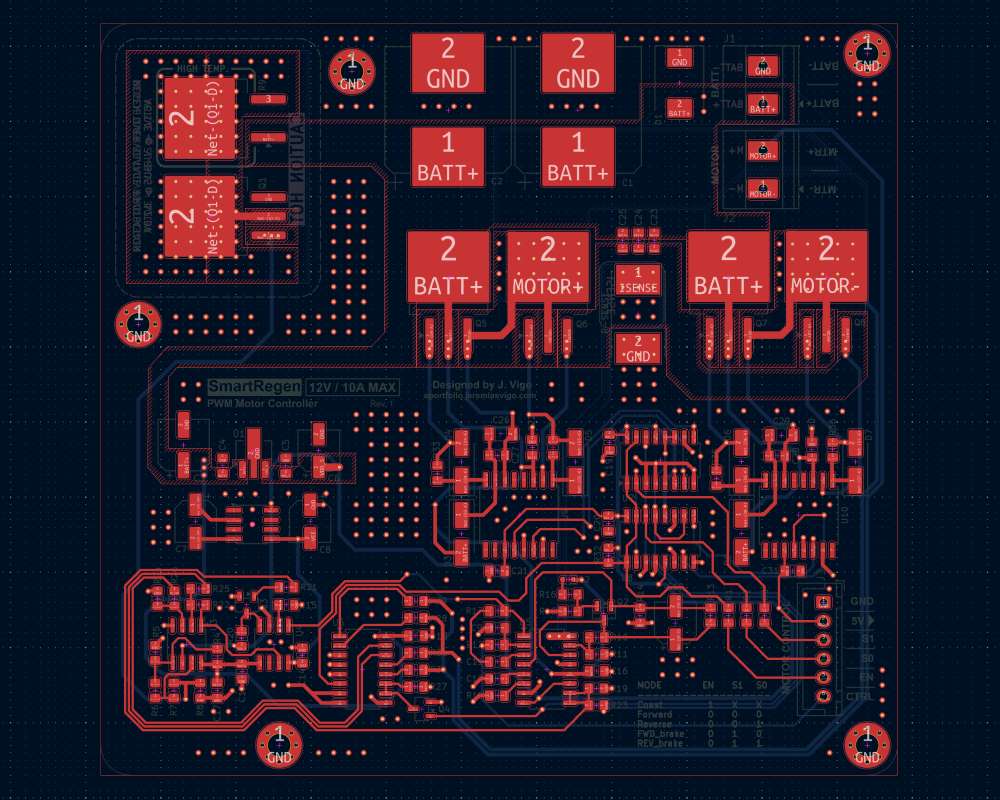
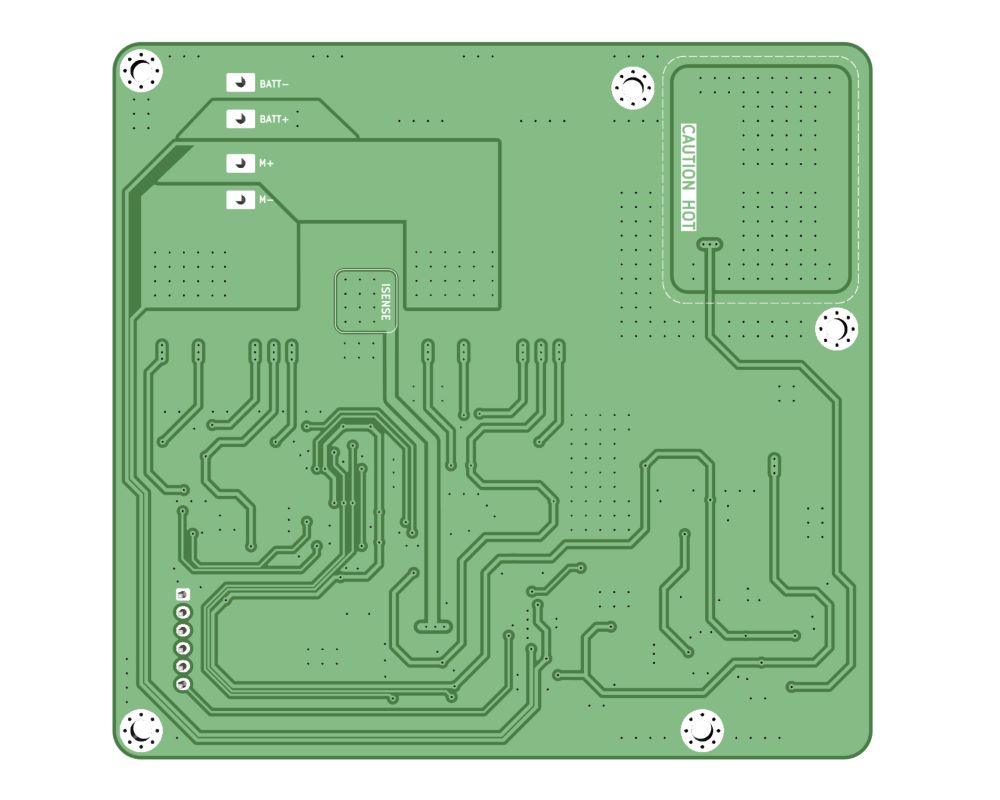
The bottom-layer PCB view shows the power traces, current-sense routing, motor/battery terminals, and wide copper paths for the H-bridge and DC-bus section.
Schematic
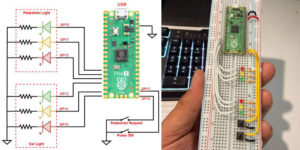
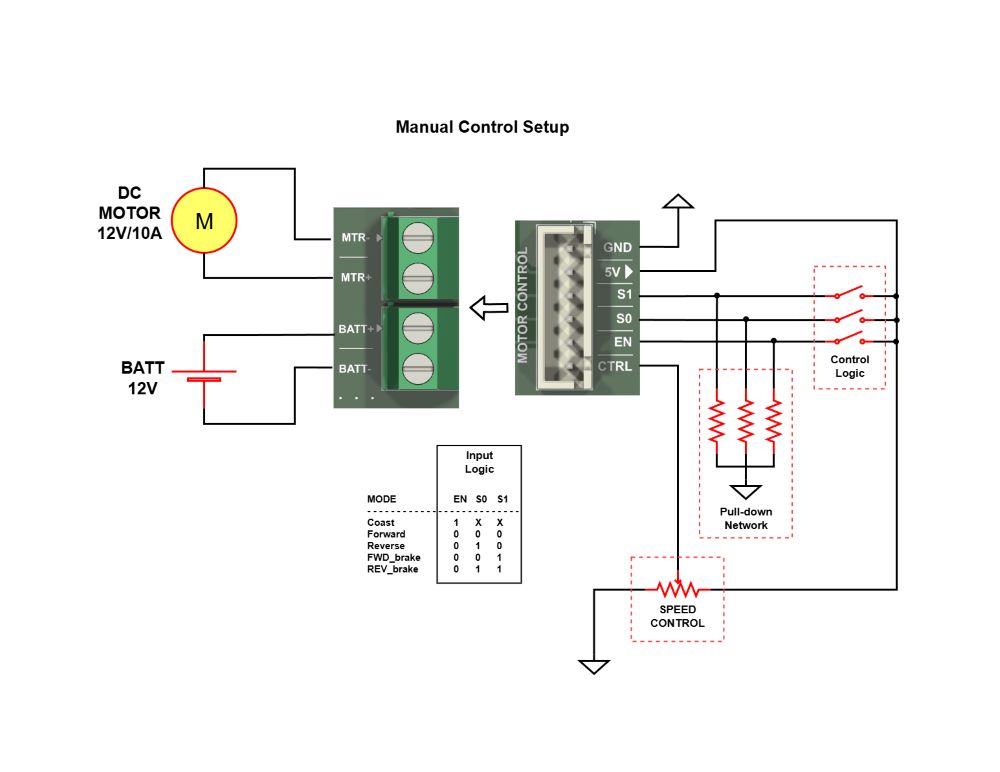
Manual Control Setup
External wiring diagram for manual testing using switches for EN, S1, and S0, plus a potentiometer connected to the CTRL input for PWM speed control. The control connector also includes a 5V output for external circuits or MCU interfacing.
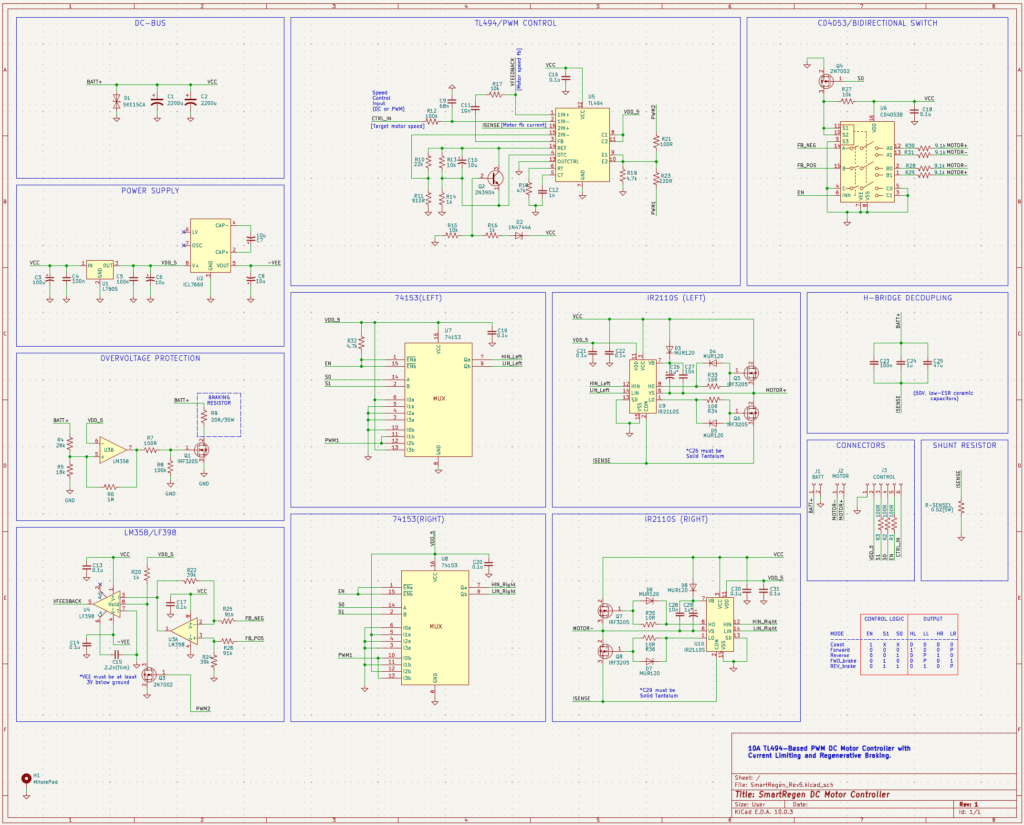
Main Schematic
Complete schematic showing the TL494 PWM controller, CD4053 feedback switching, SN74153 mode logic, IR2110S gate drivers, MOSFET H-bridge, current sensing, power supply, and regenerative overvoltage protection.
Next Step
The next step is to fabricate and test the 10A PCB revision.
Initial testing will start with a current-limited bench supply and a small DC motor before moving to higher-current testing. The first tests will focus on verifying the 5V logic supply, TL494 PWM output, mode-selection logic, gate-driver signals, and MOSFET switching behavior.
After that, the controller will be tested under load to verify:
- Forward and reverse operation
- Coast mode
- PWM speed control
- Current-limit response
- Regenerative braking behavior
- 12.8V DC-bus overvoltage protection
- Dump-load activation
- MOSFET temperature rise
- Current-sense resistor temperature rise
- Voltage drop across the enlarged PCB power traces
Once the fabricated board is assembled and tested, I will update this project with real PCB photos, oscilloscope captures, load-test results, and any changes needed after hardware validation.